 Seneca
Seneca Dinel
Dinel Georgin
Georgin Termotech
Termotech TSM
TSM Bass Instruments
Bass Instruments Crowcon
Crowcon Seitron
Seitron Stiko
Stiko WayCon
WayCon E.L.B FUELLSTANDSGERATETE
E.L.B FUELLSTANDSGERATETEBộ điều khiển PID là gì ? PID được sử dụng rộng rãi trong các ngành công nghiệp ngày nay. Mặc dù có các chức năng điều khiển PID có sẵn trong PLC, nhưng các chức năng này được sử dụng trong nhiều ứng dụng. Khoảng 95% quy trình khép kín trong lĩnh vực tự động hóa công nghiệp sử dụng loại bộ điều khiển này…
PID sẽ dựa vào một phương trình toán học để điều khiển bằng cách thay đổi liên tục các biến số. Trong công nghiệp chúng thường áp dụng để điều khiển mức nước, điều khiển nhiệt độ hoặc áp suất. Chúng gần như không thể thiếu trong các dự án của nhà máy.
Để hiểu rõ hơn về thuật toàn này cũng như cách điều khiển chúng như thế nào. Bài viết này mình xin được chia đến mọi người tất tần tấn kiếm thức liên quan tới PID nhé.
PID là gì ?
PID (Proportional Integral Derivative) là một cơ chế phản hồi vòng điều khiển được sử dụng rộng rãi trong các hệ thống điều khiển công nghiệp. PID còn được gọi với tên gọi khác là điều khiển tuyến tính.
Chúng là một phương trình toán học phức tạp. Phương trình toán này có sự liên kết chặt chẽ với nhau giữa đầu vào và đâu ra của hệ thống để đạt được một giá trị mong muốn (SP). Giá trị mong muốn có thể là giá trị nhiệt độ, áp suất, lưu lượng…
Bộ điều khiển sẽ thực hiện giảm tối đa sai số bằng cách điều chỉnh giá trị điều khiển đầu vào. Để đạt được kết quả tốt nhất, các thông số PID sử dụng trong tính toán phải điều chỉnh theo tính chất của hệ thống trong khi kiểu điều khiển là giống nhau, các thông số phải phụ thuộc vào đặc thù của hệ thống.
PID viết tắt của từ gì ?
PID được biết đến với cái tên tiếng anh là của “Proportional Integral Derivative” tạm dịch là “vi tích phân tỉ lệ”.
Hệ thống của PID
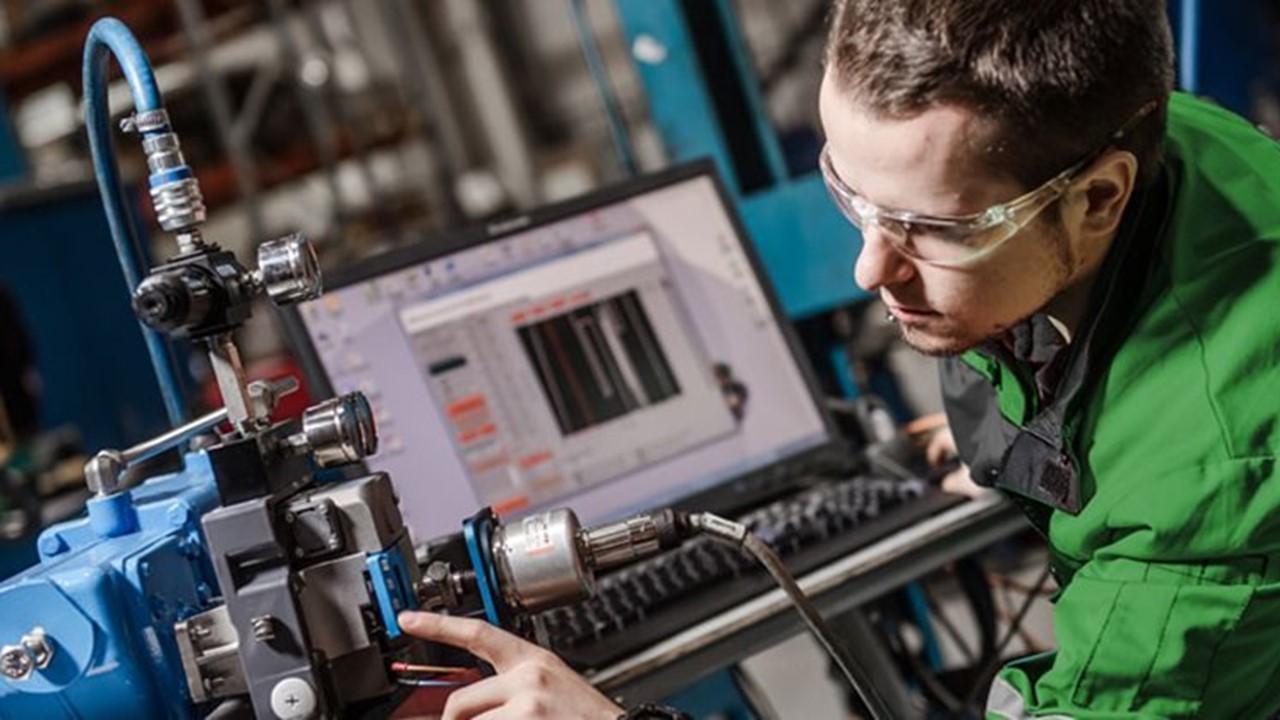
Mọi hệ thống điều khiển PID hầu hết đều bao gồm các thành phần sau.
- Thiết bị điều khiển (bộ điều khiển PID, PLC…)
- Cơ cấu điều khiển (van gia nhiệt hoặc động cơ, biến tần…)
- Thiết bị phản hồi (cảm biến nhiệt độ, cảm biến áp suất, cảm biến lưu lượng…)
Mọi thiết bị trong hệ thống này đều có sự liên kết chặt chẽ với nhau tạo nên một vòng điều khiển khép kín.
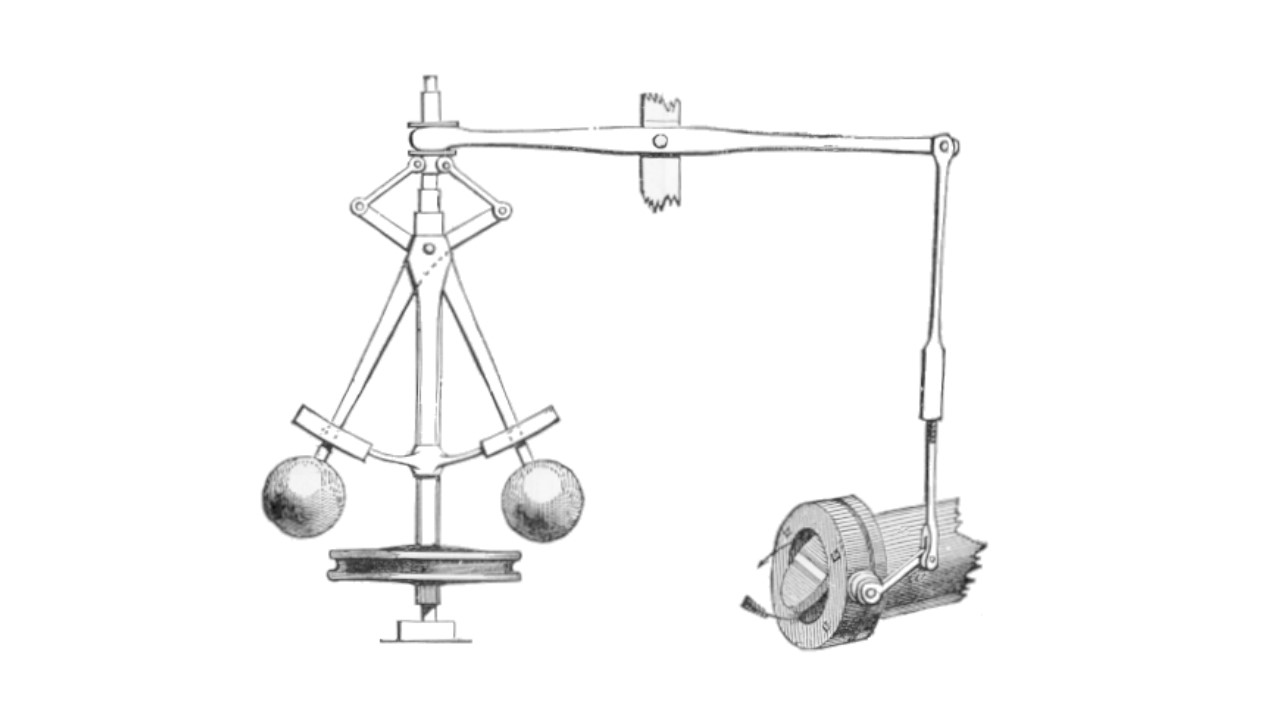
Lịch sử hình thành của PID
Các bộ điều khiển được hình thành tử nhưng năm 1890. Ý tưởng của bộ điều khiển PID được hình thành vào năm 1911 được phát triển bởi Elmer Sperry. Tuy nhiên đến nắm 1922 thì lý thuyết về điều khiển PID của kỹ sư người Mỹ gốc Nga Nicolas Minorsky mới được xuất bản. Tới thời điểm hiện tại nó vẫn còn được sử dụng trong các hệ thống điều khiển PID.
Công trình của Nicolas Minorsky giải quyết được các vấn đề về điều khiển tự động PID. Nó giải quyết các vấn đề về độ ổn định, độ chính xác. Các thử nghiệm đã được tiến hành trên tàu USS New Mexico, với bộ điều khiển điều chỉnh vận tốc gốc của bánh lái. Điềi khiển PID cho ra kết quả độ nghiêng của bánh lái trong khoảng ±1/6°, tốt hơn hầu hết người lái tàu có thể làm được.
Đến năm 1942, các qui tắc điều chỉnh của Ziegler và Nichols được giới thiệu. Các qui tắc này xuất hiện giúp các kỹ sư có thể tìm và thiết lập các thông số PID chính xác.
Đến giữa năm 1950 các bộ điều khiển PID được sử dụng rộng rãi trong công nghiệp và vẫn tiếp tục được sử dụng cho đến ngày hôm nay.
Thông số pid
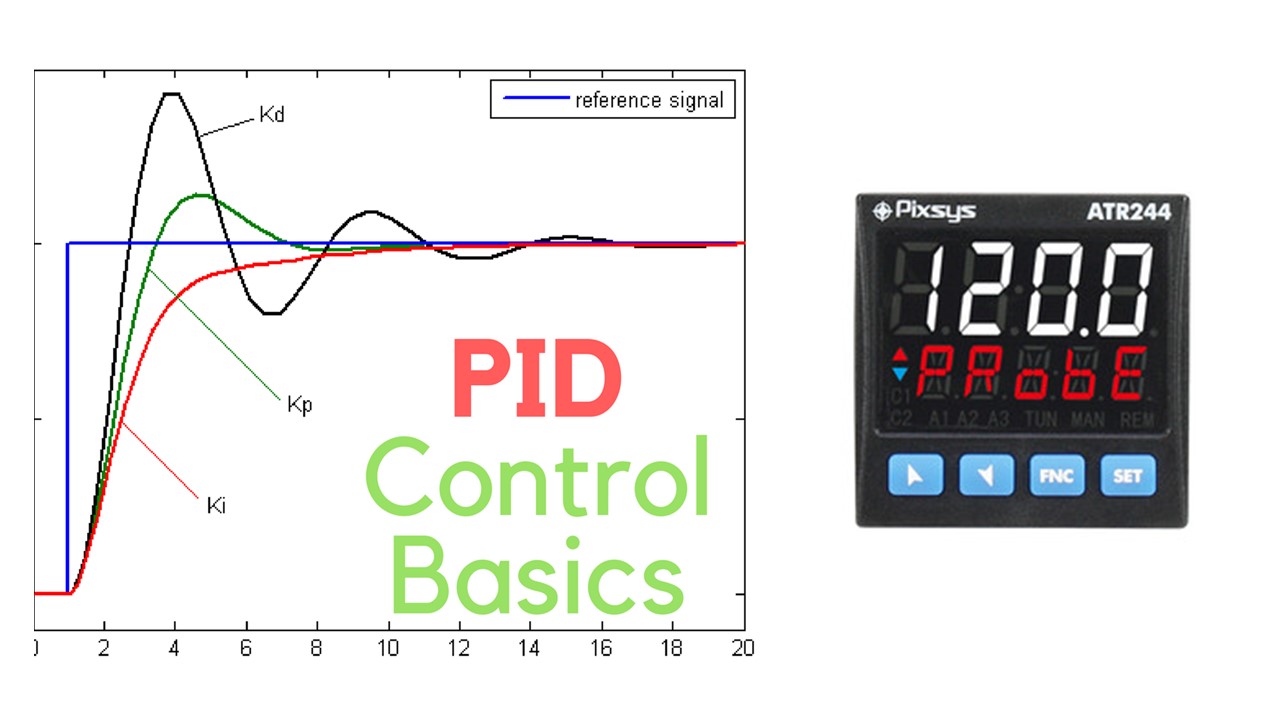
Điều khiển PID có 3 khâu: Khâu tỉ lệ, khâu tích phân và khâu vi phân.
Khâu tỉ lệ (P – controller) làm thay đổi giá trị đầu ra tỉ lệ với giá trị sai số hiện tại. Khâu tỉ lệ với chức năng làm thay đổi giá trị đầu ra đến giá trị mong muốn. Tuy nhiên trong thực tế thì sẽ không bao giờ đặt được đến giá trị mong muốn. Nó luôn có sai lệch một chút so với giá trị mong muốn.
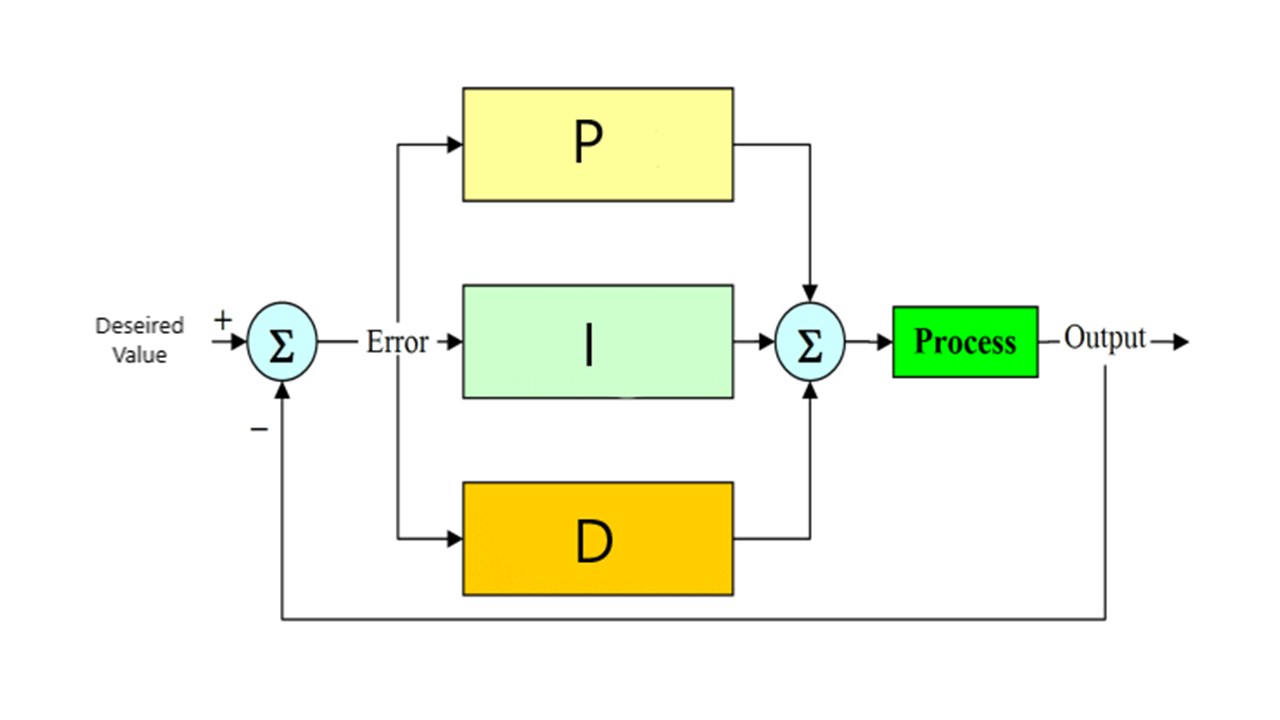
Khâu tích phân (I – controller) cộng dồn các sai số trong quá khứ. Khâu này tỉ lệ với biên độ sai số và thời gian xảy ra sai số. Với khâu tích phân nó cho thời gian đáp ứng của hệ thống nhanh hơn.
Khâu vi phân (D – controller) là vi phân của sai lệch. Nó đưa ra tín hiệu điều khiển tỉ lệ với tốc độ thay đổi sai số. Nói đơn giản là nếu tốc độ thay đổi của hệ thống quá nhanh thì khâu vi phân sẽ giảm tốc độ đó xuống. Nói chung khâu vi phân sẽ làm dao động của hệ thống tắt dần theo thời gian.
Nếu bỏ tích phân và vi phân đi thì vẫn có thể điều khiển được. Tuy nhiên sẽ có sai số khi điều khiển tỉ lệ. Thêm vào khâu tích phân cho ra hệ thống giảm sai số. Thêm vào khâu vi phân sẽ tăng thời gian đáp ứng và giảm dao động.
Xác đinh chỉ số KP, KD, KI
Đặc trưng của thuật toán PID là điều khiển các hệ số biến để đạt được kết quả mình mong muốn. Để alfm được điều đó thì ta phải xác đinh miền của chúng trước. Đó là đi xác định 3 chỉ số sau Kp, Kd và Ki. Các trị số này được xác định bằng các phương pháp như sau:
Xác định bằng kinh nhiệm
Xác định bằng kinh nghiệm phụ thuộc vào kinh nghiệm của người điều khiển. Mỗi người có một cách xác định khác nhau. Vì thế hệ thống ổn định, độ chính xác cao hay không phụ thuộc vào kinh nghiệm của người vận hành. Để xác định được thông số theo cách này chúng ta làm như sau:
Đầu tiên cho hệ số Ki=Kd=0. Chọn hệ số Kp đến khi nào hệ thống xuất hiện dao động. Lúc này ta sẽ chọn hệ số Kp bằng một nửa giá trị hoặc bằng một phần giá trị để hệ thống đáp ứng được.
Khi đã chọn được hệ số Kp, ta tiếp tục tăng Ki đến giá trị phù hợp. Nếu có dao động xuất hiện thì tăng giá trị Kd lên.
Xác định bằng phương pháp Ziegler – Nichols
Phương pháp này được phát triển bởi John G. Ziegler và Nathaniel B. Nichols. Đây cũng là phương pháp dựa vào kinh nghiệm tuy nhiên nó có lợi thế là độ chính xác cao hơn. Tuy nhiên xác định bằng phương pháp này khá phức tạp. Phương pháp này dùng nhiều trong phòng thí nghiệm.
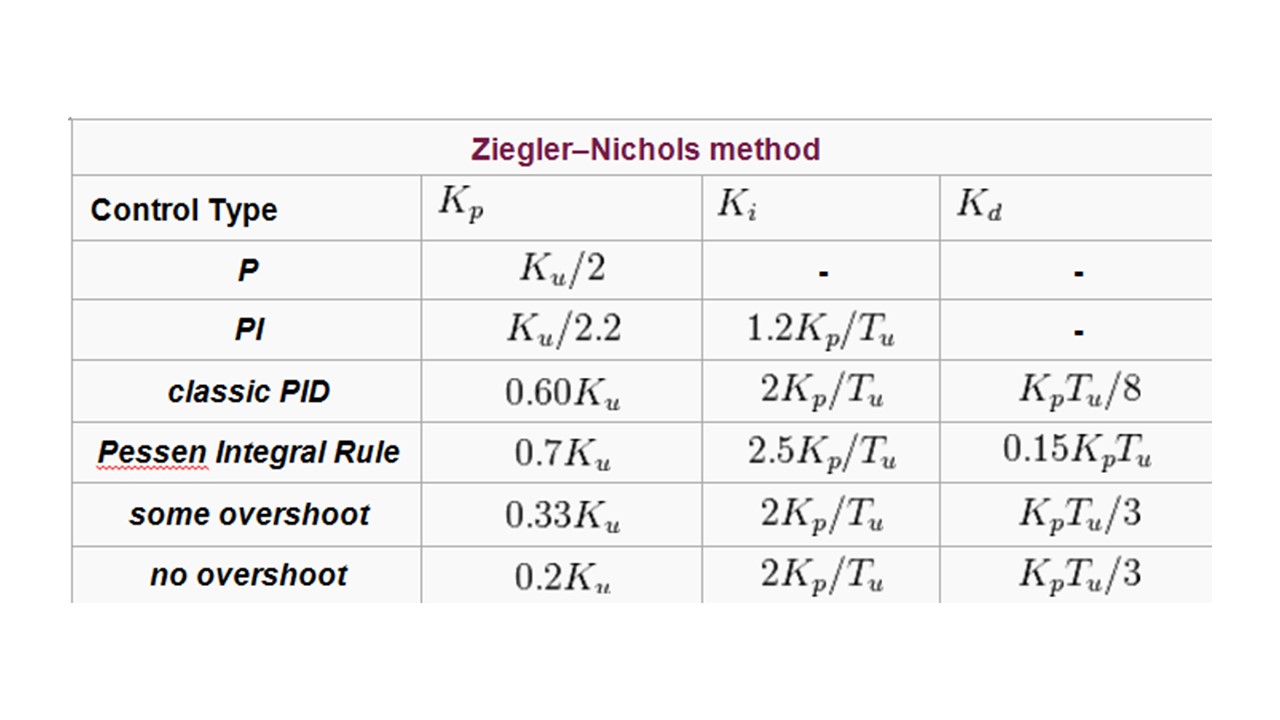
Cũng như phương pháp sử dụng bằng kinh nghiệm. Đâu tiên ta cho hệ số Kd=Ki=0. Sau đó tăng Kp đến khi hệ thống xuất hiện dao động tuần hoàn. Lúc này ta đặt hệ số Kp khi xuất hiện dao động tuần hoàn là Kc (Kp=Kc).
Ta đo chu dao động của hệ thống đặt là Pc. Lúc này ta xác định hệ số PID theo bảng dưới đây.
Xác định bằng phần mềm
Hiện nay dùng phần mềm để xác định thông số PID được ưa chuộng nhất. Phần mềm sẽ mô phỏng vật lý các chuyển động. Cho ra các hệ số chính xác nhất, các gói phần mềm này dựa theo các tính toàn vật lý, các cơ sở dữ liệu mô phỏng để cho ra hệ số chính xác nhất.
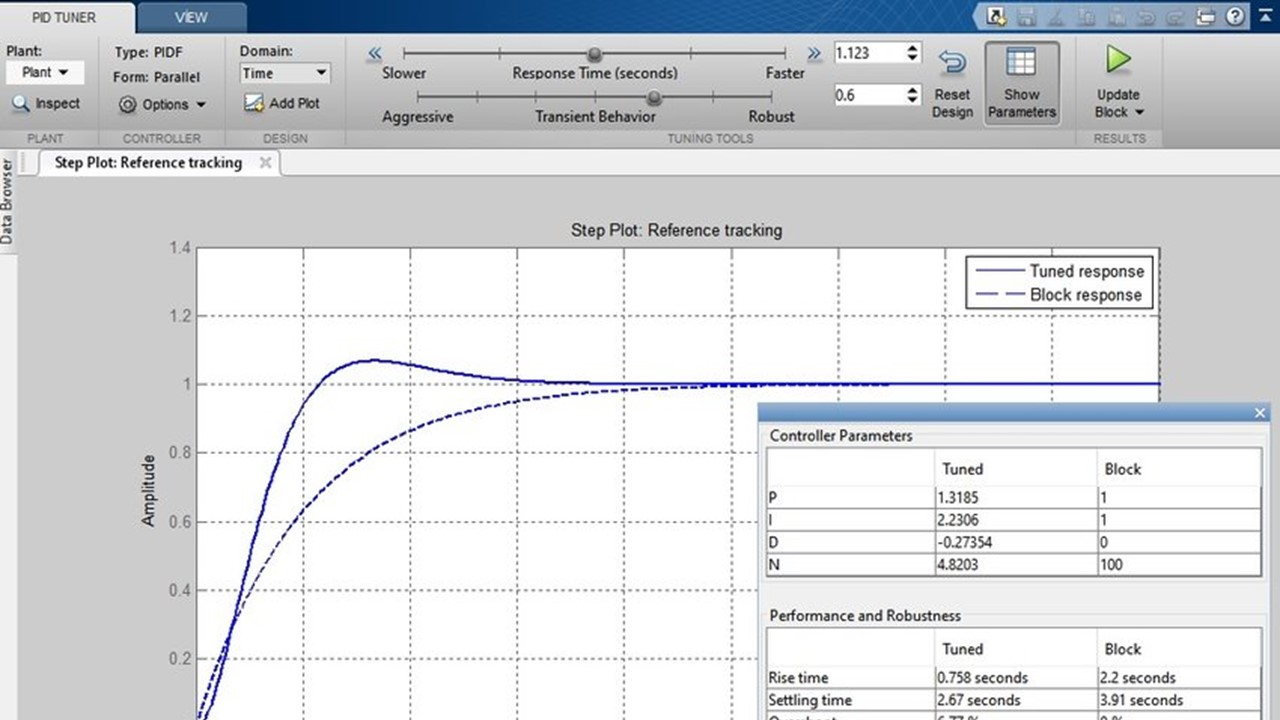
Ngày nay sử dụng việc xác định các thông số điều khiển bằng phần mềm được cho là tối ưu và nhanh chóng nhất. Bởi vì các phương pháp tinh chỉnh ở trên có thể kéo dài đến vài ngày, có khi đến cả tháng để xác định độ ổn định của hệ thống. Giá trị tối ưu nhất cho hệ thống có thể mất cả vài tháng.
Để tránh mất thời gian về việc hiểu chỉnh, ngày nay các hãng thiết kế bộ điều khiển PID đều nhúng sẵn thuật toán tự điều chỉnh thông số. Ví dụ các bộ điều khiển PID đến từ hãng Pixsys đều có hệ thống xác định thông số PID tự động. Trong PLC của siemens cũng thuật toán xác định thông số PID.
Ưu nhược điểm của PID
Tất cả các phương pháp điều khiển tự động được xây dụng trên các mô hình toán học. Các bộ điều khiển đều có ưu và nhược điểm riêng của nó. Tùy vào ưu điểm của từng phương pháp sẽ được ứng dụng vào một mô hình khác nhau. Với PID cũng thế nó những điểm mạnh và hạn chế của riêng nó.
Ưu điểm
Với PID ưu điểm lớn nhất của nó chính là độ chính xác và độ tin cậy cao. Tới thời điểm hiện tại, chúng ta luôn không ngừng cải tiến các hệ thống sử dụng PID. Có nhưng thiết bị được thiết kế dành riêng để điều khiển PID như bộ điều khiển PID ATR244, ATR144, …

Bộ PID đơn giản dễ sử dụng. Nó không yêu cầu mô hình toán học vẫn có thể điều khiển. Thậm chí điều khiển vẫn rất tốt nếu có các thông số PID phù hợp. Thuật toán điều khiển PID được tích hợp rất nhiều trong các bộ điều khiển hiện nay như PLC, các bộ điều khiển đơn lẻ…
Độ ổn định của điều khiển này rất cao. Nó có thể chính xác ngay cả khi không có bất kì cải tiến nào. Có thể nối tầng nhiều bộ điều khiển PID…
Nhược điểm
Nhược điểm của PID đó chính là nó chỉ có thể điều khiển tuyến tính. Vì thế trong mỗi mô hình điều khiển khác nhau sẽ có những thông số điều khiển khác nhau. Mặc dù kiểu điều khiển là như nhau. Với các mô hình điều khiển phi tuyến nó sẽ cho ra rất nhiều kết quả khác nhau, và độ chính xác của nó không cao.
P.I.D có khâu vi phân khá nhạy với tần số cao. Vì thế nó rất dễ nhiễu ở các môi trường có tần số lớn. Trong trường hợp này buộc phải thiết kế bộ lọc thông thấp để giảm bớt tín hiệu nhiễu cho hệ thống.
Bộ điều khiển không thể thích nghi với những sự thay đổi nhỏ. Khi thêm bất kì một biến số nào chúng ta buộc phải cài đặt lại các thông số của nó. Hoặc với chỉ một biến số nhỏ cũng làm cho điều khiển PID chạy sai lệch.
Vì sao PID được dùng nhiều
Ngày nay, với công nghệ ngày càng phát triển, các hệ thống điều khiển tự động cũng phát triển theo. Từ đó kéo theo nhiều lý thuyết đều khiển tự động khác nữa. Với mỗi phương pháp đều khiển tự động khác nhau cho ra một kết quả khác nhau độ chính xác khác nhau. Tuy nhiên các phương pháp khác lại có độ phức tạp cao hơn so với điều khiển PID.
Với các mô hình điều khiển tự động khác PID cũng cho ra kết quả. Tuy chính xác không cao nhưng vì PID rất dễ sử dụng cho nên nó được dùng rất nhiều. Không những thế PID cho phép điều khiển mà không cần hoàn thiện mô hình toán học. Với các phương pháp khác người ta cần phải xây dựng mô hình toán học để đảm bảo độ chính xác khi điều khiển. Vì lý do đó P.I.D được sử dụng rộng rãi.
Nó được dùng trong các hệ thống lò hơi để đảm bảo rằng mức nước trong lò hơi không quá ít. Điều khiển PID còn được dùng để điều khiển mức nước. Để nước trong bồn chứa luôn ở một giá trị cố định nào đo.
Điều khiển PID còn được dùng trong biến tần. Nó được dùng để điều khiển các động cơ có tốc độ và monent mong muốn. Ví dụ trong bồn khuấy tốc độ khuấy là 1000v/p thì với biến tần sử dụng PID để cho cánh khuấy luôn duy trì ở mức đó. Còn nhiều ứng dụng khác nữa.
Ứng dụng của PID
Mình sẽ nếu ứng dụng chung mà thường bắt gặp nhất trong các dự án công nghiệp hiện nay.
Điều khiển mực nước PID
Các hệ thống xử lý nước hay những bình chứa đựng chất lỏng trong nhà máy hiện tại ít nhiều vẫn cần sự can thiệt của con người trong quá trình vận hành. Chính vì thế, nên nhiều khi sự sai sót sẽ diễn ra bởi một vài nguyên nhân chủ quan của con người. Thế nên, làm thế nào mà chúng ta có thể điều khiển được mức nước ở những khu vực bể chứa, bình chứa… mà không cần phải can thiệt trực tiếp vào.
Thì PID là câu trả lời cho bài toán trên. Đối với bài toán PID mực nước phổ biến nhất đó là đóng mở bơm ở hay mưc khác nhau.
Ví dụ như:
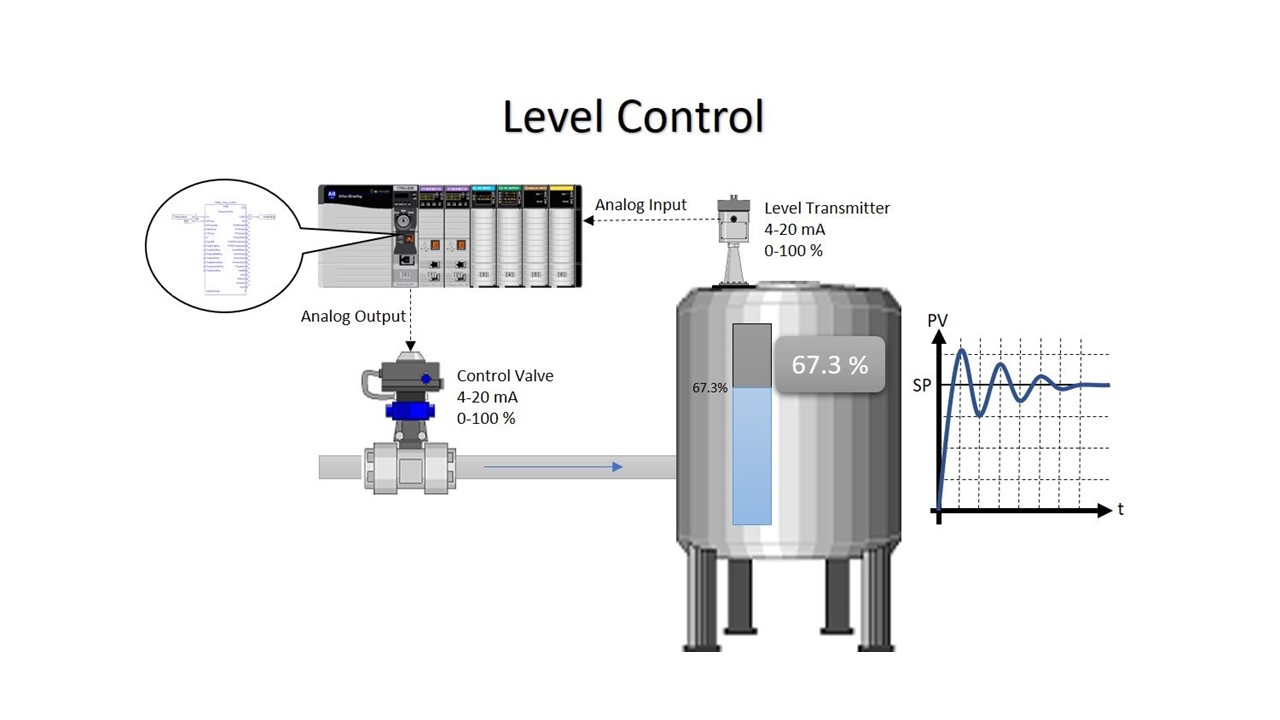
Bạn có bồn nước cao 2m. Điều kiện của bài toán là luôn giữ vòi xả của bơm nước sao cho mức nước trong bồn ở mưc 1m8.
Để làm được điều này thì cần phải chuẩn bị các thiết bị sau:
- 1 cảm biến đo mức nước (tín hiệu analog)
- 1 Bộ điều khiển PID
- 1 biến tần dàng cho máy bơm
- 1 máy bơm nước
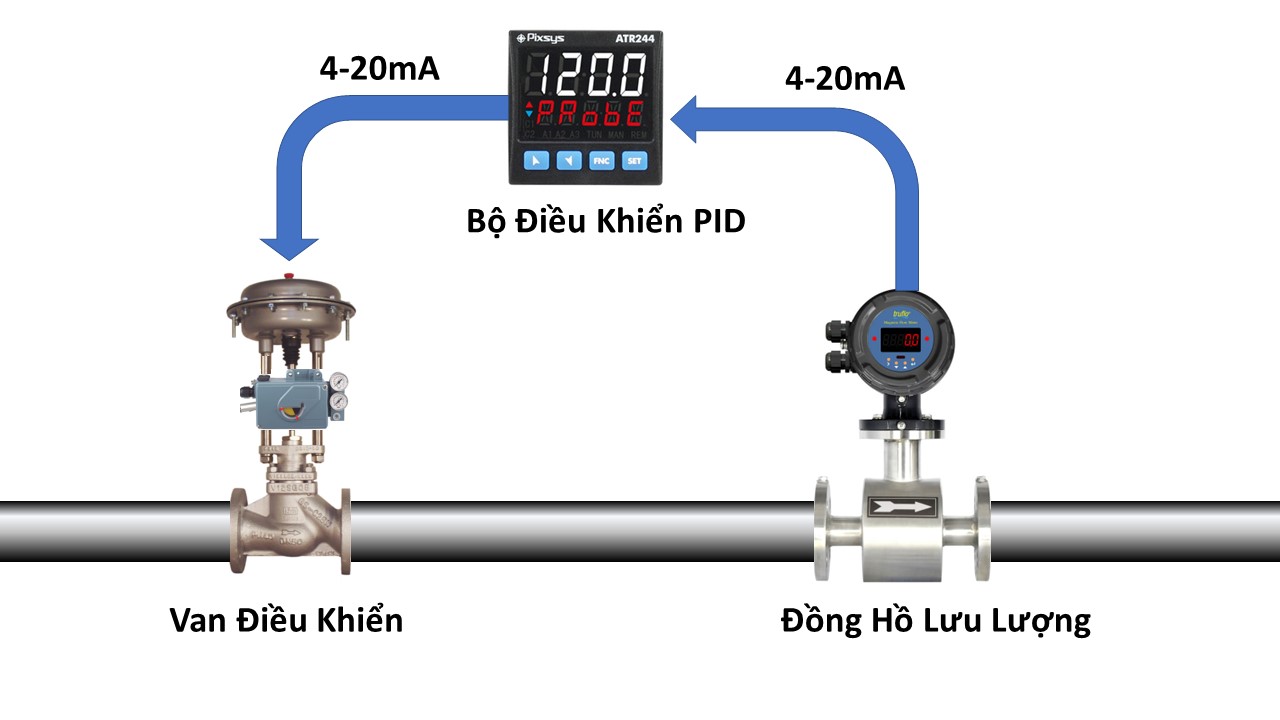
Khi chuẩn bị xong các thiết bị thì chúng ta thực hiện nối dây chúng với nhau. Theo sơ đồ như ở trên thì cảm biến sẽ được gắn vào bồn và chuyển tín hiệu analog 4-20mA về bộ điều khiển.
Bộ điều khiển sẽ nhận tín hiệu từ cảm biến đo mức này và dúng thuật toán PID để so sánh với các điều kiện. Xong sau đó bộ điều khiển sẽ xuất ra tín hiệu analog và truyền vào biến tần. Từ đó biến tần sẽ điều chỉnh động cơ sao cho lưu lượng nước luôn giữ ở mức 1m8 trong bồn chứa.
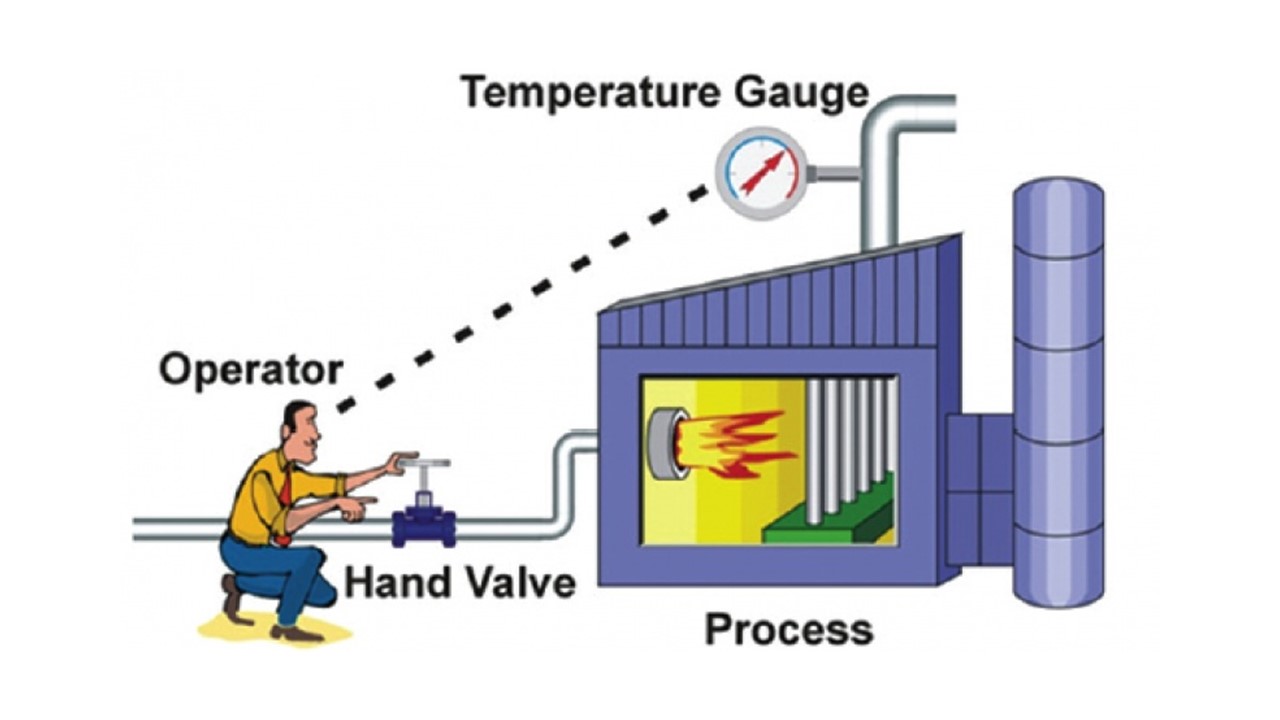
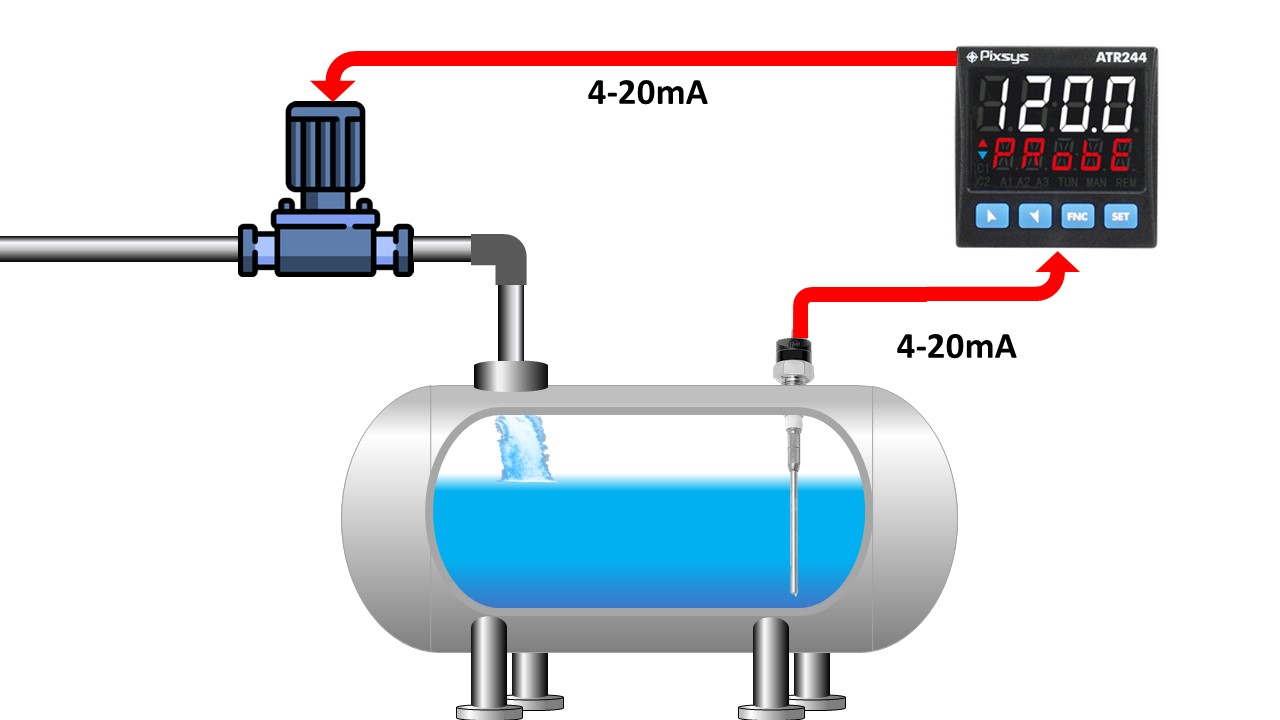
Điều khiển nhiệt độ PID
Cũng giống như điều khiển mực nước thì điều khiển nhiệt độ cũng có ứng dụng tương tự. Mình sẽ viết một bài chi tiết về các điều khiển nhiệt độ bàng PID và những yếu tố liên quan đến chúng. Ở đây mình chỉ nếu khai quát các thức chúng hoạt động thôi.
Thông thường để làm giảm nhiệt một loại máy móc, động cơ hay một hệ thống nào đó thì người ta thường sử dụng một hệ thống làm mát tự động. Máy nà sẽ đo nhiệt độ môitr ường bằng một cảm biến nhiệt độ và sau đó xử lý tín hiệu này bằng thuật toán PID.
Khi xử lý xong và thực hiện so sánh với các điều kiễn mẫu khắc bộ điều khiển này sẽ xuất tín hiệu analog lại về hệ thống bơm nước làm mát sao cho mước nước làm mát này luôn đảm bảo cho máy móc hoạt động ở một nhiệt độ nhất định.
Điều khiển áp suất PID
Đây cũng là mộ trong những ứng dụng khá phổ biến trong công nghiệp. Thông thường chúng được ứng dụng trong ccas bình chứa khí có áp suất sao. Như các bạn biết thì khí nén là một dạng năng lương không thể nào thiếu trong các nhà máy sản xuất.
Để lưu trữ khí nén người ta thường dùng một bình áp suất làm nơi chưa. Chúng như một cái kho nnawg nượng cung cấp tho cả hệ thông của bạn. Để nạp khí cho hệ thống này hầu hết các kỹ sư sẽ lựa chọn phương pháp tự động để đảm bảo mức khsi trong bình luôn ở mức đầy và sẵn sàng cung cấp cho thiết bị.
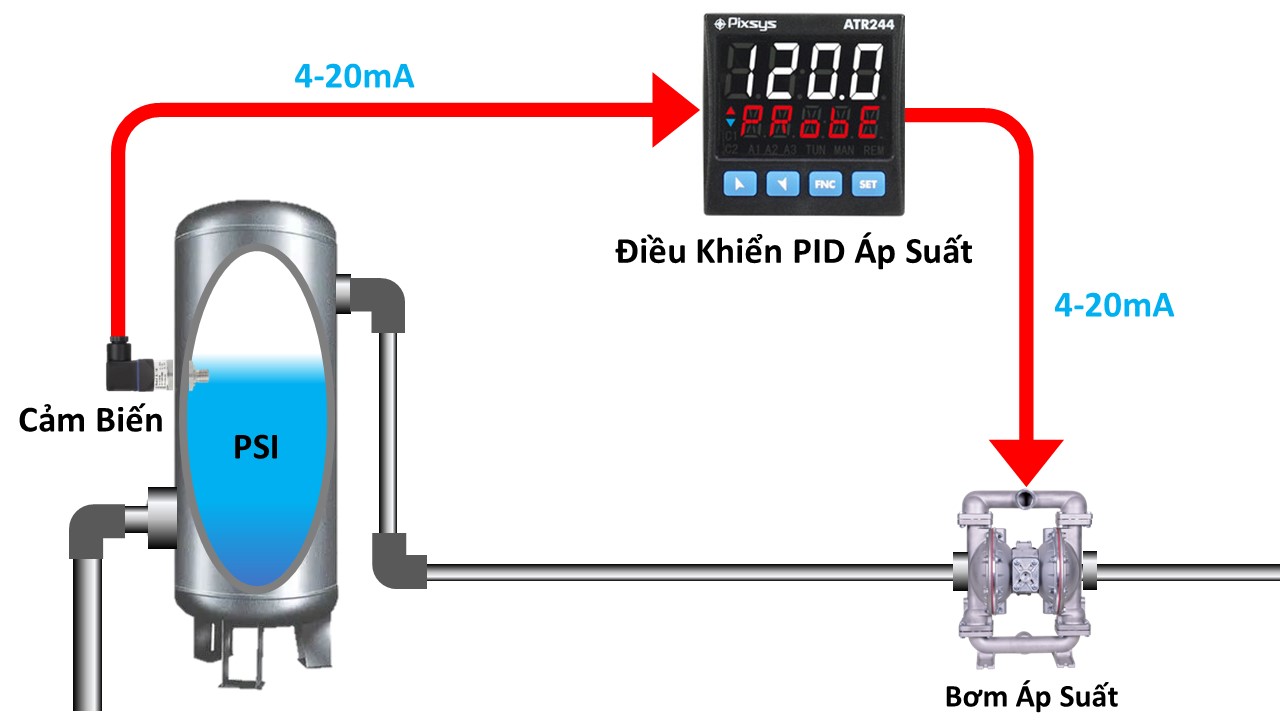
Ví dụ
Bình chưa của các bạn có áp suất khí nén khi đầy là 60Bar. Và khi dưới 25Bar thì bơm khí nén tự động hoạt động trở lại để cung cấp khí cho bình chứa.
Đối với bài toán này cũng giống như hai bài toán trên về nhiệt độ và mức nước. Bộ điều khiển có thuật toán PID đều có thể giải quyết được hết.
Kết luận
Trên đây là tất cả những nội dung PID là gì ? mà Trọng muốn chia sẻ đến các bạn. Mong rằng bài viết này sẽ giúp ích được các bạn trong qau trình làm việc và học tập. Và điều nữa là tât cả các thiết bị trên bên mình đều cung cấp. Bạn nào có như cầu sử dụng hoặc tìm hiểu thiết bị thì hãy hay liên hệ với mình. Mình sẽ cung cấp giải pháp miễn phí và các thiệt bị chính hãng từ Châu Âu cho mọi người. Cảm ơn các bạn đã theo dõi bài viết của Trọng. Chúc các bạn thành công!
Bài viết tham khảo: Điều khiển nhiệt độ bằng PID
Liên hệ
Kỹ Sư Cơ Điện Tử – Mr. Trọng
Mobi/Zalo: 0975 116 329
Mail: trongle@huphaco.vn
BÀI VIẾT LIÊN QUAN
Loại bỏ clo khỏi nước bằng cách nào? Hầu hết mọi người đã quá quen thuộc với mùi vị nước uống cảu nhà mình. Khi uống nước nào đó lạ lạ thì mọi người đều phát hiện được ra ngay. Những cảm giác “ Lờ lợ” hay là “ Gây Gây” hoặc nước có “ […]
Profinet là gì ? Sự phát triển công nghệ thời đại số của các doanh nghiệp, bao gồm việc kết nối mạng ở tất cả các lĩnh vực nói chung, giữa IT (Information Technology) và OT (Operational Technology) nói riêng, đang mở ra những xu hướng và tiềm năng lớn. PROFINET là tiêu chuẩn truyền […]
VFD là gì ? Với kiến thức, kinh nghiệm nhiều năm hoạt động trong lĩnh vực sửa chữa thiết bị điện tử, sửa chữa thiết bị công nghiệp, kết hợp với một số tài liệu khoa học chính thống của các nhà khoa học trên thế giới, Trọng đưa vào bài viết những thông tin […]